

كيف قام طلاب الجامعات ببناء أسرع روبوت من روبيك الذي يحل المكعب حتى الآن
سجل فريق من طلاب جامعة بوردو مؤخراً سجل غينيس العالمي الجديد مع روبوتهم المخصص الذي حل مكعب روبيك في 0.103 ثانية فقط. كان ذلك حوالي ثلث الوقت الذي استغرق الأمر الروبوت السابق لتحديد الرقم القياسي. لكن السجل الجديد لم يتحقق ببساطة عن طريق بناء روبوت يتحرك بشكل أسرع. استخدم الطلاب مزيجًا من أنظمة الكاميرا عالية السرعة ولكن منخفضة الدقة ، ومكعب مخصص لتحسين القوة ، وتقنية حل خاصة شائعة بين مجمعة السرعة البشرية.
بدأ سباق التسلح الروبوت الذي يحل مكعب Rubik في عام 2014 ، عندما قام روبوت يسمى Cubestormer 3 المصمم بأجزاء Lego Mindstorms و Samsung Galaxy S4 حل اللغز الأيقوني في 3.253 ثانية-أسرع من أي إنسان أو روبوت في ذلك الوقت. (ينتمي الرقم القياسي العالمي الحالي لحل الإنسان إلى مكعب روبيك إلى Xuanyi Geng ، الذي فعل ذلك في 3.05 ثانية فقط). على مدار عقد من الزمان ، تمكن المهندسون من تقليل هذا السجل إلى مئات المللي ثانية فقط.
في شهر مايو الماضي ، ادعى المهندسون في Mitsubishi Electric في اليابان الرقم القياسي العالمي بروبوت يحل مكعب في 0.305 ثانية. وقفت الرقم القياسي لمدة عام تقريبًا قبل أن يكون الفريق من مدرسة Elmore Family للهندسة الكهربائية والكمبيوتر – Junpei Ota ، و Aden Hurd ، و Matthew Patrohay ، و Alex Berta – حطمتها. أصبح روبوتهم يعرف باسم مكعب بوردوبيك. إن الوصول إلى سجل الروبوت إلى أقل من نصف ثانية يتطلب الابتعاد عن LEGO ، وبدلاً من ذلك ، باستخدام مكونات محسنة مثل المحركات الصناعية. ومع ذلك ، تطلب الحصول على ذلك إلى 0.103 ثانية فقط من الفريق من بوردو لإيجاد طرق جديدة متعددة لحلق ميلي ثانية.
“كل روبوت قام به أصحاب الأرقام القياسية العالمية السابقة قد ركز نوعًا ما على شيء جديد” ، يقول باتروهاي حرية. عندما حطم طلاب GRAD MIT الرقم القياسي في عام 2018 ، اختاروا الأجهزة الصناعية التي تفوقت على الأداء الذي استخدمه أصحاب السجلات السابقون. اختار Mitsubishi Electric المحركات الكهربائية التي كانت أكثر ملاءمة للمهمة المحددة المتمثلة في تدوير كل جانب من جوانب المكعب ، بدلاً من الأجهزة التي تحركت بشكل أسرع.
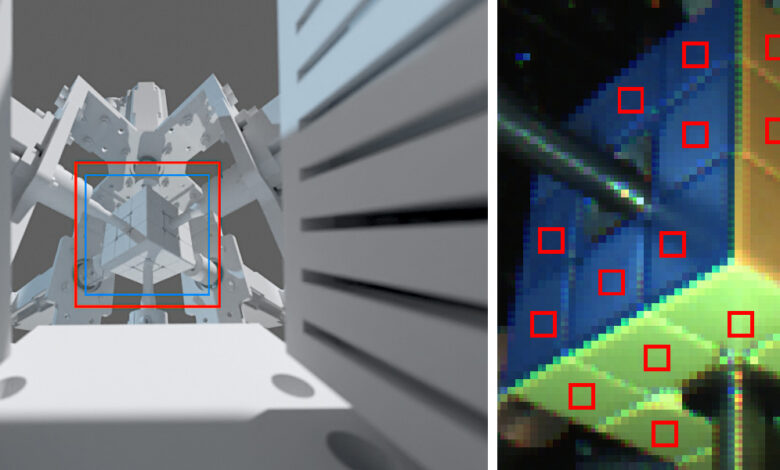
ومع ذلك ، فإن أول شيء تحسنه طلاب بوردو هو في الواقع السرعة التي يمكن أن يتصورها روبوتهم المكعب المخفوق. يُسمح لمنافسي التكوين البشري للسرعة بدراسة مكعب روبيك قبل بدء المؤقت الخاص بهم ، ولكن سجل الروبوت يتضمن الوقت الذي يستغرقه لتحديد موقع جميع المربعات الملونة. استخدم الطلاب زوجًا من كاميرات رؤية الماكينة عالية السرعة من FLIR ، بدقة 720 × 540 بكسل فقط ، وأشار إلى زوايا المعارضة من المكعب. يمكن لكل كاميرا رؤية ثلاثة جوانب في وقت واحد أثناء التعرضات التي استمرت أقل من 10 ميكروثانية.
على الرغم من أنه قد يبدو فوريًا ، إلا أنه يستغرق بعض الوقت للكاميرا لمعالجة البيانات القادمة من مستشعر وتحويلها إلى صورة رقمية. يستخدم مكعب Purdubik نظامًا مخصصًا لاكتشاف الصور يتخطى معالجة الصور تمامًا. كما أنه يركز فقط على مساحة صغيرة جدًا لما يراه مستشعره لكل كاميرا – وهي منطقة اقتصاصها 128 × 124 بكسل فقط – لتقليل كمية البيانات التي يتم نقلها.
يتم إرسال البيانات الخام من المستشعرات مباشرة إلى نظام الكشف عن الألوان عالي السرعة والذي يستخدم قياسات RGB من مناطق عينة أصغر في كل مربع لتحديد لونها أسرع من الأساليب الأخرى-حتى الذكاء الاصطناعي.
يعترف باتروهاي: “في بعض الأحيان أقل موثوقية قليلاً ، لكن حتى لو كان ثابتًا بنسبة 90 في المائة ، فهذا جيد بما يكفي طالما أنه سريع. نريد حقًا هذه السرعة.”
على الرغم من الكثير من الأجهزة على روبوت بوردو ، اختار الفريق الذهاب مع البرامج الحالية عندما يتعلق الأمر بمعرفة أسرع طريقة لحل مكعب مخفوق. لقد استخدموا Rob-Twophase من Elias Frantar ، وهي خوارزمية لحل المكعب التي تأخذ في الاعتبار القدرات الفريدة للروبوتات ، مثل القدرة على تدوير جانبي المكعب في وقت واحد.
استفاد الفريق أيضًا من تقنية حل المكعب من روبيك تسمى Corner Cutting حيث يمكنك البدء في قلب جانب واحد من المكعب قبل أن تنتهي من تحويل جانب آخر عمودي عليه. ميزة هذه التقنية هي أنك لا تنتظر جانبًا واحدًا لإنهاء دورته تمامًا قبل بدء آخر. للحظة وجيزة ، هناك تداخل بين حركات الجانبين التي يمكن أن تؤدي إلى كمية كبيرة من الوقت المحفوظة عندما تطارد رقما قياسيا عالميا.
يتمثل التحدي في قطع الزاوية في أنه إذا كنت تستخدم الكثير من القوة (مثل الروبوت قادر على ذلك) ولا تايم الأمور بشكل مثالي ، فيمكنك كسر مكعب Rubik تمامًا أو حتى تدمير مكعب Rubik تمامًا. بالإضافة إلى إتقان توقيت حركات الروبوت وتسارع محركاتها ، كان على الطلاب تخصيص المكعب نفسه.
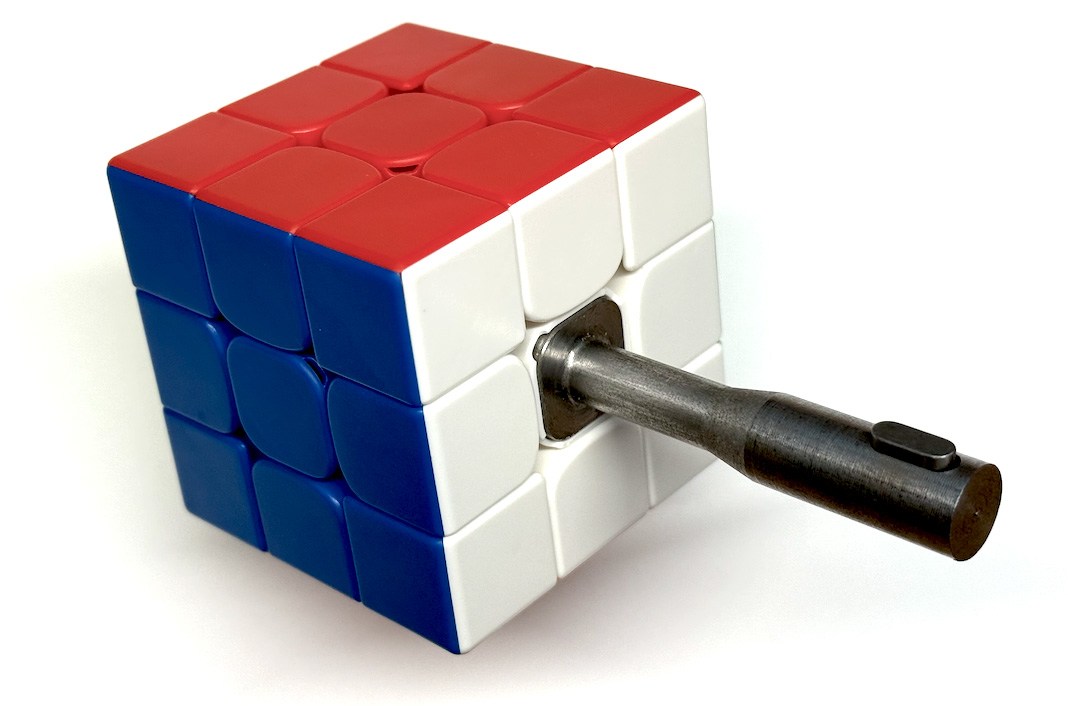
تتبع غينيس وورلد ريكوردات إرشادات جمعية المكعبات العالمية ، التي لديها قائمة طويلة من اللوائح التي يجب اتباعها قبل الاعتراف بالسجل. إنه يسمح للمنافسين بتعديل المكعب ، طالما أنه يتقلب ويتحول مثل مكعب Rubik القياسي وله تسعة مربعات ملونة على كل من جوانبها الستة ، مع كل جانب لون مختلف. يمكن استخدام مواد أخرى غير البلاستيك ، لكن أجزاء الألوان كلها تحتاج إلى نفس الملمس.
لتحسين متانته ، قام فريق Purdue بترقية الهيكل الداخلي لمكعباتهم مع نسخة مطبوعة ثلاثية الأبعاد مخصصة مصنوعة من البلاستيك Nylon الأقوى. يسمح WCA أيضًا باستخدام مواد التشحيم للمساعدة في جعل المكعبات تدور بحرية أكبر ، ولكن هنا يتم استخدامها لسبب مختلف.
يقول باتروهاي: “المكعب الذي نستخدمه في السجل ضيقة بشكل لا يصدق ، مثل ضيق للغاية”. “من الصعب للغاية تشغيل الشخص الذي قمنا بتعديله. ليس مستحيلًا ، لكن لا يمكنك قلبه بأصابعك. عليك حقًا أن تدخل معصمك”. عند حل المكعب بسرعات عالية ، يساعد زيوت التشحيم في تنعيم حركاته بينما يقلل التوتر المتزايد ويحسن التحكم في الحيل الموفرة للوقت مثل قطع الزاوية.
تساعد محركات المؤازرة الأسرع في تقليل أوقات الحل ، لكنها ليست بسيطة مثلماش على سرعتها وتأمل في الأفضل. يستخدم مكعب Purdubik ست محركات متصلة بأعمدة معدنية تنطلق في وسط كل جانب من المكعب. بعد اختبار العديد من الأساليب المختلفة ، استقر الفريق على ملف تعريف منحرف منحرف حيث تتسارع الماكين بسرعات تصل إلى 12،000،000 درجة/S2 ، ولكن تباطؤ أبطأ بكثير ، أقرب إلى 3،000،000 درجة/S2 ، بحيث يمكن للروبوت أن يضع كل جانب أكثر دقة كما يتعلق الأمر.
هل يمكن لمكعب بوردوبيك أن يكسر الرقم القياسي مرة أخرى؟ يعتقد Patrohay أنه ممكن ، لكنه سيحتاج إلى مكعب أقوى مصنوع من شيء آخر غير البلاستيك. “إذا كنت تريد أن تصنع مكعب روبيك الخاص بالتطبيق بالكامل من نوع من مركب ألياف الكربون ، فيمكنني أن أتخيل أنك قادر على البقاء على قيد الحياة بسرعات أعلى ، وأن تكون قادرًا على البقاء على قيد الحياة بسرعات أعلى سيسمح لك بخفض الوقت”.